ZLTECH 3phase 60mm Nema24 24V 100W/200W/300W/400W 3000RPM BLDC motor para máquina de impressão








Um motor elétrico CC sem escova (BLDC) é um motor elétrico alimentado por uma fonte de tensão de corrente contínua e comutado eletronicamente em vez de escovas como nos motores CC convencionais.Os motores BLDC são mais populares do que os motores DC convencionais hoje em dia, mas o desenvolvimento desse tipo de motor só foi possível a partir da década de 1960, quando a eletrônica de semicondutores foi desenvolvida.
Semelhanças Motores BLDC e DC
Ambos os tipos de motores consistem em um estator com imãs permanentes ou bobinas eletromagnéticas do lado de fora e um rotor com enrolamentos de bobina que podem ser alimentados por corrente contínua no interior.Quando o motor é alimentado por corrente contínua, um campo magnético será criado dentro do estator, atraindo ou repelindo os ímãs no rotor.Isso faz com que o rotor comece a girar.
Um comutador é necessário para manter o rotor girando, porque o rotor pararia quando estivesse alinhado com as forças magnéticas no estator.O comutador comuta continuamente a corrente CC através dos enrolamentos e, assim, também comuta o campo magnético.Dessa forma, o rotor pode continuar girando enquanto o motor estiver energizado.
Diferenças entre motores BLDC e DC
A diferença mais proeminente entre um motor BLDC e um motor DC convencional é o tipo de comutador.Um motor DC usa escovas de carvão para esta finalidade.Uma desvantagem dessas escovas é que elas se desgastam rapidamente.É por isso que os motores BLDC usam sensores – geralmente sensores Hall – para medir a posição do rotor e uma placa de circuito que funciona como um interruptor.As medições de entrada dos sensores são processadas pela placa de circuito que cronometra com precisão o momento certo para comutar conforme o rotor gira.
Parâmetros
| Item | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| Estágio | 3 Fase | 3 Fase | 3 Fase | 3 Fase |
| Tamanho | Nema24 | Nema24 | Nema24 | Nema24 |
| Tensão (V) | 24 | 24 | 48 | 48 |
| Potência nominal (W) | 100 | 200 | 300 | 400 |
| Corrente nominal (A) | 5.5 | 11.5 | 8.3 | 12 |
| Corrente de Pico (A) | 16.5 | 34,5 | 25 | 36 |
| Torque nominal (Nm) | 0,32 | 0,63 | 0,96 | 1.28 |
| Pico de Torque (Nm) | 1 | 1.9 | 3 | 3,84 |
| Velocidade Nominal (RPM) | 3000 | 3000 | 3000 | 3000 |
| Nº de pólos (pares) | 4 | 4 | 4 | 4 |
| Resistência (Ω) | 0,22±10% | 0,59±10% | 0,24±10% | |
| Indutância (mH) | 0,29±20% | 0,73±20% | 0,35±20% | |
| Ke (RMS)(V/RPM) | 4,2x10-3 | 4,2x10-3 | 8,3x10-3 | 8,5x10-3 |
| Inércia do Rotor (kg.cm²) | 0,24 | 0,48 | 0,72 | 0,96 |
| Coeficiente de Torque (Nm/A) | 0,06 | 0,06 | 0,09 | 0,12 |
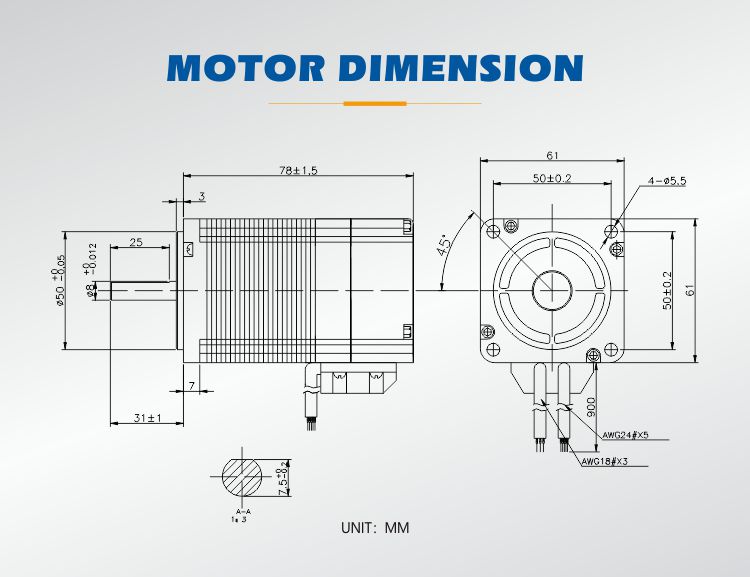
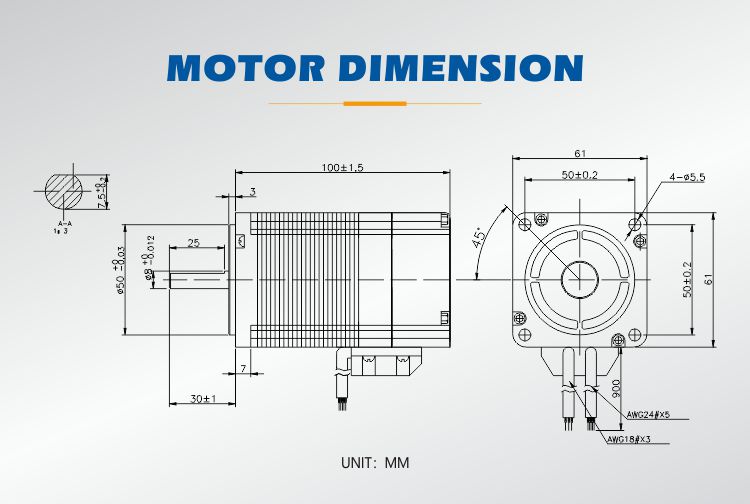
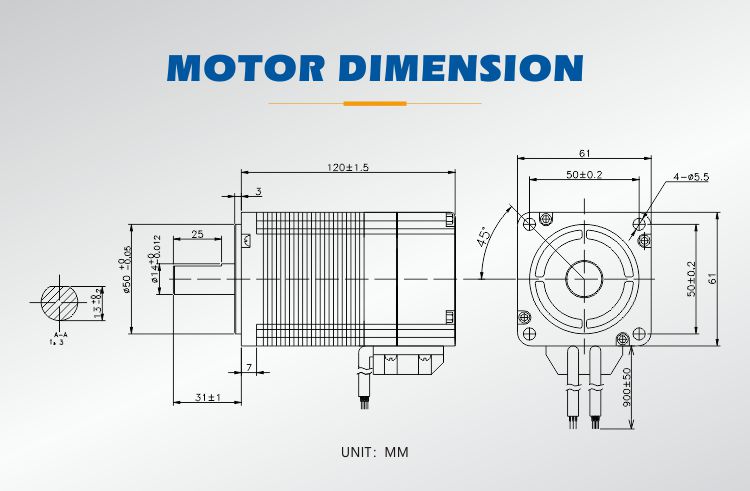
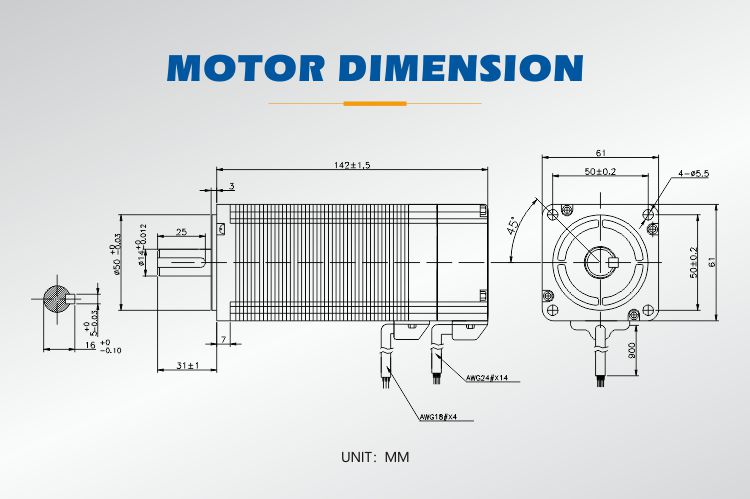
| Diâmetro do eixo (mm) | 8 | 8 | 14 | 14 |
| Comprimento do eixo (mm) | 31 | 30 | 31 | 31 |
| Comprimento do motor (mm) | 78 | 100 | 120 | 142 |
| Peso (kg) | 0,85 | 1.25 | 1,5 | 2.05 |
| Driver BLDC Adaptado | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
Dimensão
Inscrição

Embalagem

Dispositivo de produção e inspeção

Qualificação e Certificação

Escritório e fábrica

Cooperação

categorias de produtos
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A passo passo...
-
M4040 ZLTECH 2 fases 12V-40V DC 0,5A-4,0A escova...
-

ZLTECH Nema17 0,5/0,7Nm 18V-36V passo integrado...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 24V-36V 5A DC elétrico Modbus RS485 bru...
-

ZLTECH 57mm Nema23 24VDC 1000-wrie circuito fechado ...





